Zixing Wang
Pronounced as Zee-Shing
I am a Ph.D. candidate at the Department of Computer Science at Purdue University, advised by Prof. Ahmed H. Qureshi. Previously, I received my Master in Robotics and Bachelor in Computer Science from the University of Minnesota, where I worked with Prof. Nikolaos Papanikolopoulos.
My research covers world-action models, generative policy steering and heterogeneous system manipulation.
Updates
[05/2026] Our paper "Physics-Conditioned Grasping for Stable Tool Use" is accepted by IROS'26.
[05/2026] Our paper "Efficient Sim-to-Real Transfer of World-Action Models from Synthetic Priors" is accepted by CVPR'26 EAI workshop.
[05/2026] I will intern at Amazon, Personal Robotics Group this summer.
[01/2026] Our paper "PPGuide: Steering Diffusion Policies with Performance Predictive Guidance" is accepted by ICRA'26.
[01/2026] I will intern at RAI Institute this spring.
[11/2025] I passed my Ph.D. preliminary exam and became a PhD candidate.
View Older News
[05/2025] The paper "Dynamic Robot Tool Use with Vision Language Models" is accepted by the RSS 2025 R3 Workshop
[04/2025] I will intern at Mitsubishi Electric Research Laboratories (MERL) this summer.
[01/2025] Our paper "Implicit Physics-aware Policy for Dynamic Manipulation of Rigid Objects via Soft Body Tools" is accepted by ICRA'25.
[01/2025] Our paper "DeRi-IGP: Manipulating Rigid Objects Using Deformable Objects via Iterative Grasp-Pull" is accepted by RA-L.
[10/2023] The short paper "DeRi-Bot: Learning to Collaboratively Manipulate Rigid Objects via Deformable Objects" is accepted by CoRL'23 L4SR Workshop.
[08/2023] The paper "DeRi-Bot: Learning to Collaboratively Manipulate Rigid Objects via Deformable Objects" is accepted by RA-L and will be presented in ICRA'24.
[06/2023] The paper "Efficient Q-Learning over Visit Frequency Maps for Multi-agent Exploration of Unknown Environments" is accepted by IROS 2023.
Experiences
-
Amazon, Personal Robotics Group
Sunnybale, CA, USA
Applied Scientist II Intern
May 2026 to Aug 2026

-
Robotics and AI Institute (RAI Inst)
(Formerly Boston Dynamics AI Institute)
Cambridge, MA, USA
Research Intern
Jan 2026 to May 2026

-
Mitsubishi Electric Research Laboratories (MERL)
Cambridge, MA, USA
Research Intern
May 2025 to Aug 2025

-

Research
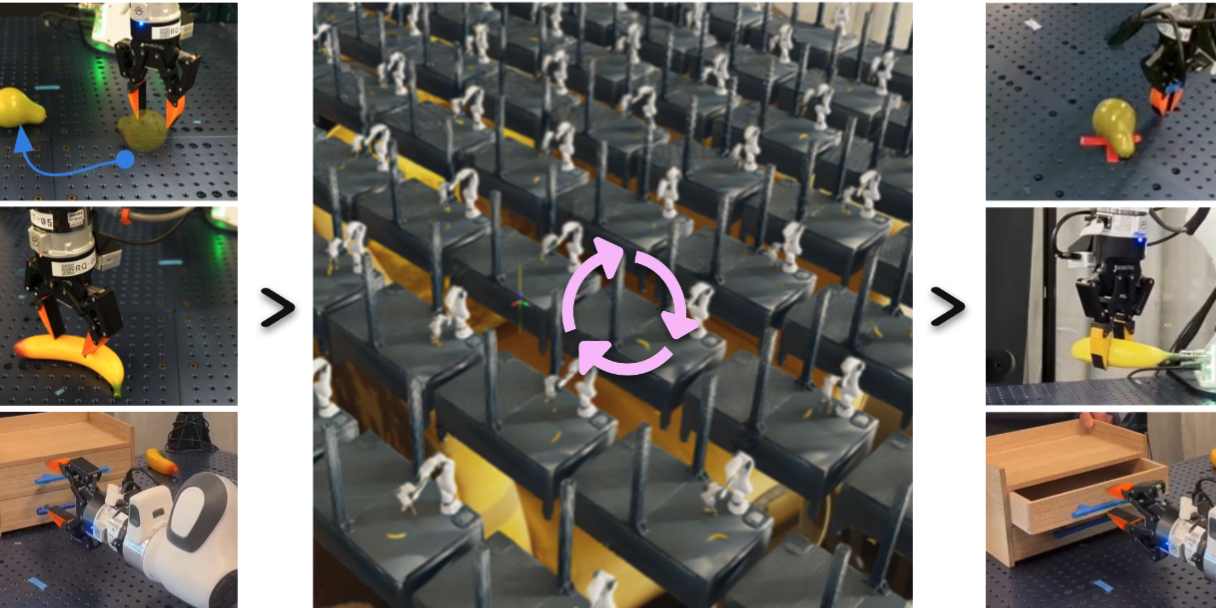
ExpertGen: Scalable Sim-to-Real Expert Policy Learning from Imperfect Behavior Priors
Under review
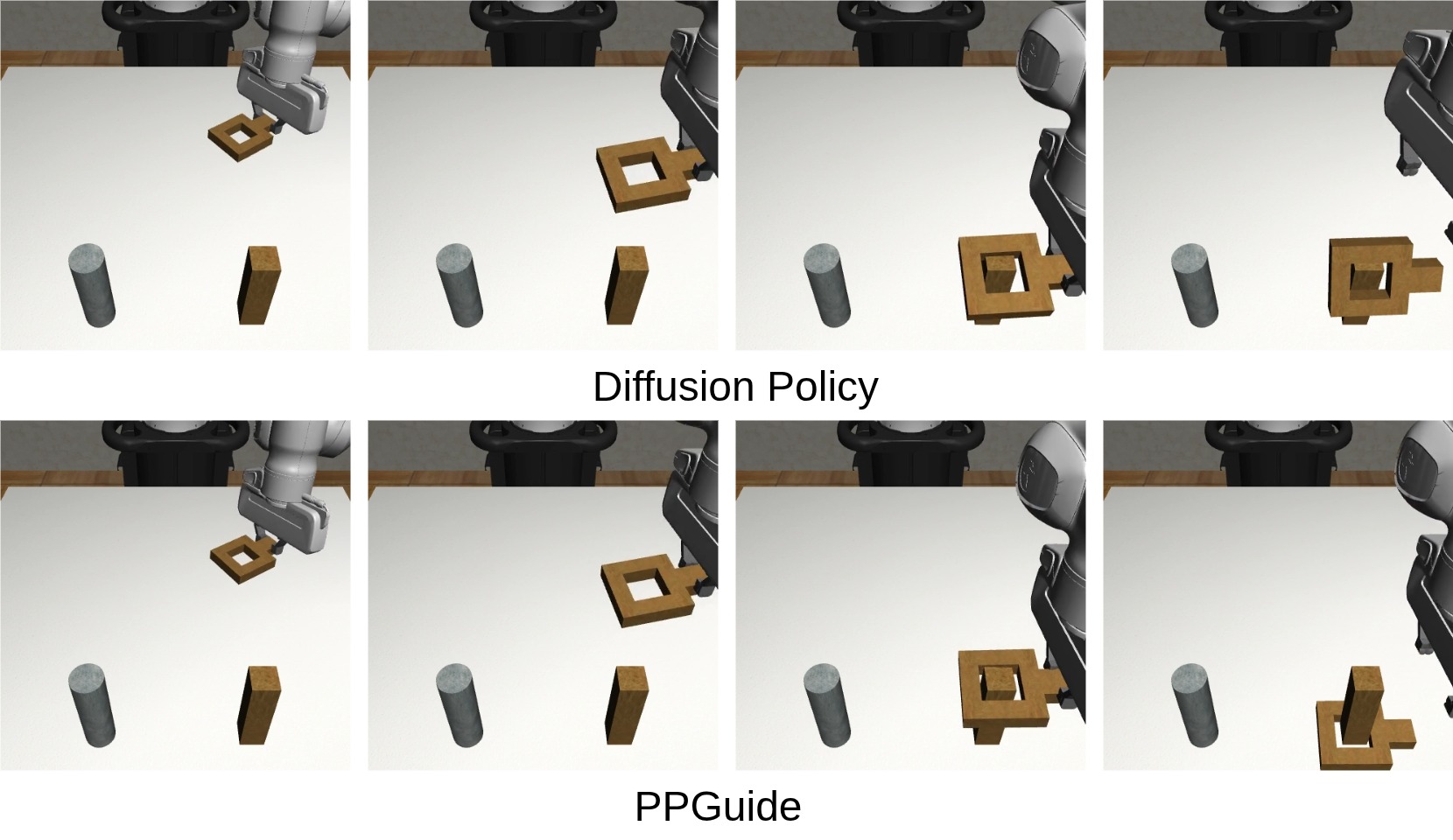
PPGuide: Steering Diffusion Policies with Performance Predictive Guidance
ICRA 2026
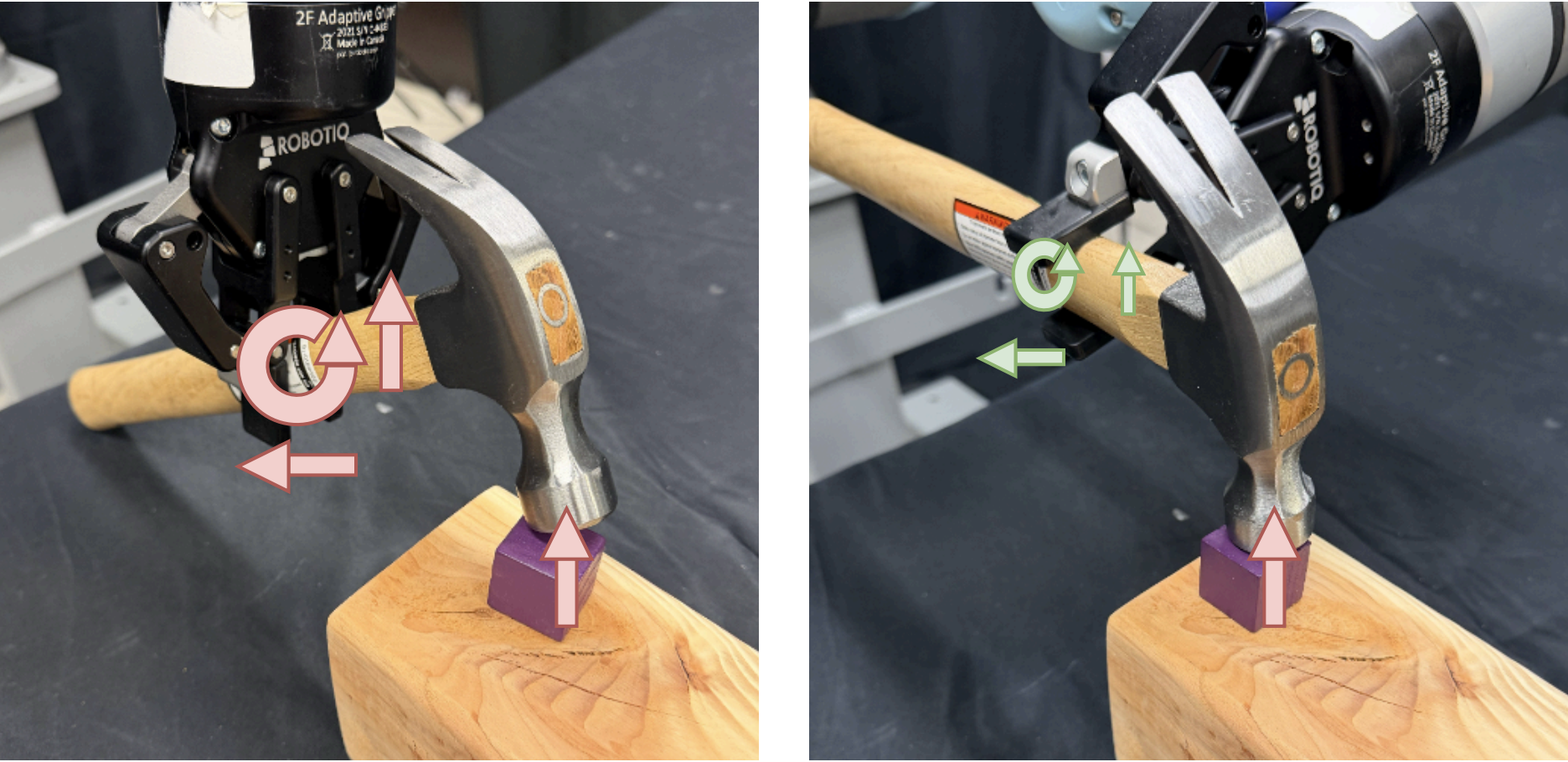
Physics-Conditioned Grasping for Stable Tool Use
IROS 2026
RSS 2025 workshop on Reasoning for Robust Robot Manip in the Open World
Workshop paper title: Dynamic Robot Tool Use with Vision Language Models
RSS 2025 workshop on Reasoning for Robust Robot Manip in the Open World
Workshop paper title: Dynamic Robot Tool Use with Vision Language Models
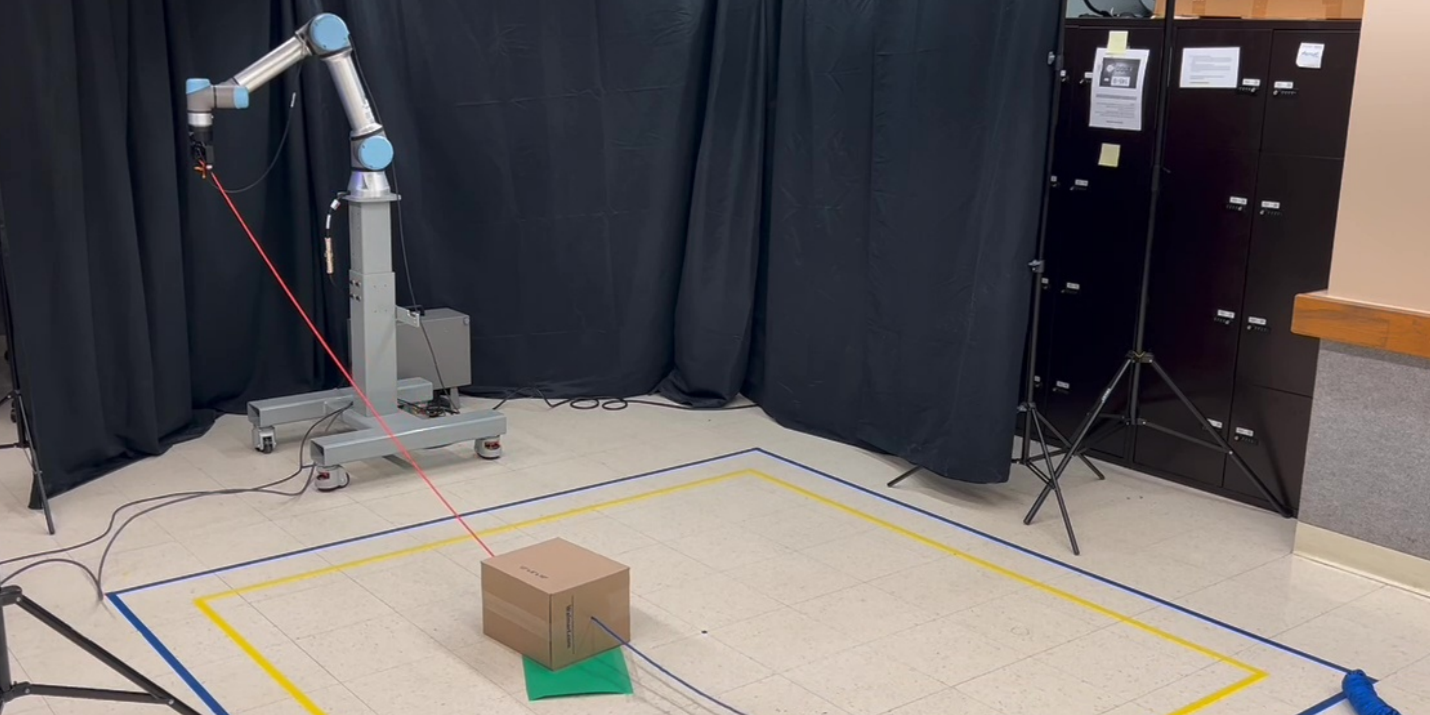
Implicit Physics-aware Policy for Dynamic Manipulation of Rigid Objects via Soft Body Tools
ICRA 2025
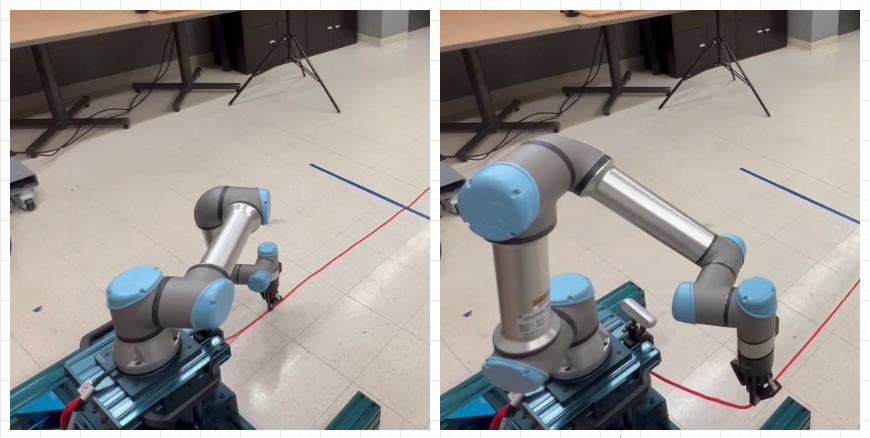
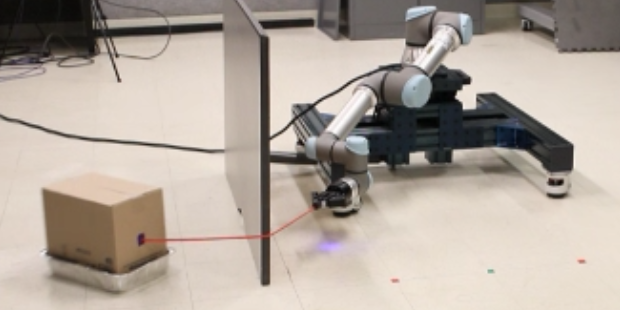
DeRi-IGP: Manipulating Rigid Objects Using Deformable Objects via Iterative Grasp-Pull
RA-L (2024)
DeRi-Bot: Learning to Collaboratively Manipulate Rigid Objects via Deformable Objects
RA-L (2023) appearing at ICRA 2024
CoRL 2023 workshop on Learning for Soft Robots
CoRL 2023 workshop on Learning for Soft Robots
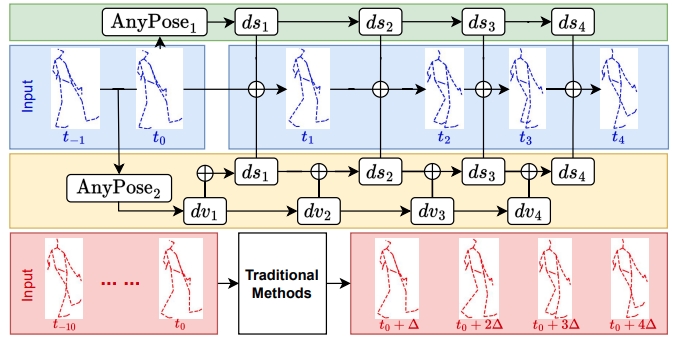
AnyPose: Anytime 3D Human Pose Forecasting via Neural Ordinary Differential Equations
Arxiv 2309.04840

Efficient Q-Learning over Visit Frequency Maps for Multi-agent Exploration of Unknown Environments
IROS 2023

Spatial Action Maps Augmented with Visit Frequency Maps for Exploration Tasks
IROS 2021
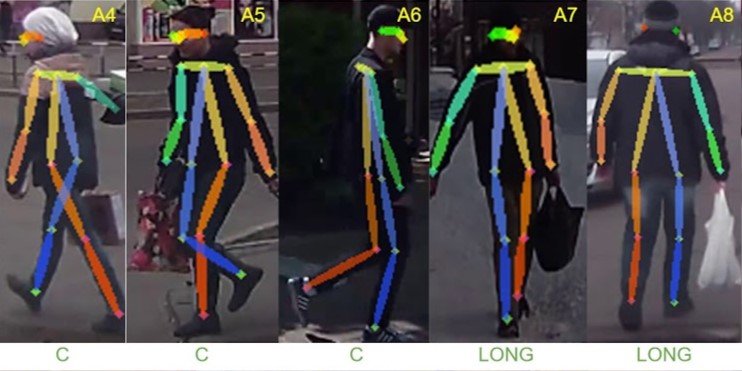
Estimating Pedestrian Crossing State Based on Single 2D Body Pose
IROS 2020

ECO: Egocentric Cognitive Mapping
arxiv 1812.00312